Note
This page was generated from tut//2-From-components-to-chip//2.11-Routing-101.ipynb.
Routing 101#
In this tutorial, we will show how to connect two points with a transmission line route.
Introduction#
Routes are strips of metal (or cuts in the bulk metal), that electrically connect two input-specified pins (pin = point on the perimeter of a QComponent, with orientation, indicating an allowed point for electrical contact).
The core class QRoute is designed to support different route types, currently only single or double (CPW) wiring. We will use the CPW transmission line in the remainder of this notebook, and in the majority of the other tutorial notebooks.
QRoute inherits the generic QComponent. QRoute also has two attributes of type QRouteLead, which enable close control of the start and end points in a route. We will describe in this notebook how to utilize the QRouteLead.QRoutePoint is a convenient exchange format for directed points.
QRoute is an abstract class, without a make() method, thus cannot be instantiated as a design component. QRoute is inherited by classes that can be instantiated (have a make() method - blue highlights in the image below). By subclassing further, you can implement comprehensive routing algorithms, such as the RouteMixed.
In this notebook we will only look at the simple RouteStraight and RouteLead.

Prerequisite#
Initialize metal
[1]:
%reload_ext autoreload
%autoreload 2
[2]:
from qiskit_metal import designs
from qiskit_metal import MetalGUI, Dict
design = designs.DesignPlanar()
gui = MetalGUI(design)
design.variables['cpw_width'] = '10 um'
design.variables['cpw_gap'] = '6 um'
[3]:
# enable rebuild of the same component
design.overwrite_enabled = True
We will use the following classes in the notebook. Let’s import all of them at once.
[4]:
# for pins:
from qiskit_metal.qlibrary.terminations.open_to_ground import OpenToGround
# for routing:
from qiskit_metal.qlibrary.tlines.straight_path import RouteStraight
from qiskit_metal.qlibrary.tlines.framed_path import RouteFramed
# for jogs:
from collections import OrderedDict
To remove the complexity of large QComponents, we will only use the OpenToGround QComponent to establish pins. We want to initialize a dictionary of type Dict as follows (naming matching Example 1). We will later update this dictionary as needed using the simpler dot notation.
[5]:
pin_opt = Dict(pin_inputs=Dict(start_pin=Dict(
component='open1i',
pin='open'),
end_pin=Dict(
component='open1o',
pin='open')))
Example 1: Straight routing between two pins#
First, we make sure our design contains two pins to connect to.
[6]:
design.delete_all_components() #needed only for rebuilds. will get a warning
otg11 = OpenToGround(design, 'open1i', options=dict(pos_x='0mm', pos_y='1mm', orientation='180'))
otg12 = OpenToGround(design, 'open1o', options=dict(pos_x='0.5mm', pos_y='1mm', orientation='0'))
gui.rebuild()
gui.autoscale()
Then we create the route in between them. Notice we are using the previously defined pin_opt to indicate which pins to connect to.
[7]:
route1 = RouteStraight(design, 'cpw_1', pin_opt)
gui.rebuild()
gui.autoscale()
gui.highlight_components(['open1i','open1o'])
#gui.screenshot()
Example 2: Any direction#
Let’s add a few pins that we can use to connect in pairs. We here align them following a variety of orientations.
[8]:
otg21 = OpenToGround(design, 'open2i', options=dict(pos_x='0mm', pos_y='2mm', orientation='90'))
otg22 = OpenToGround(design, 'open2o', options=dict(pos_x='0mm', pos_y='1.5mm', orientation='-90'))
otg31 = OpenToGround(design, 'open3i', options=dict(pos_x='0.35mm', pos_y='1.55mm', orientation='45'))
otg32 = OpenToGround(design, 'open3o', options=dict(pos_x='0mm', pos_y='1.2mm', orientation='-135'))
otg41 = OpenToGround(design, 'open4i', options=dict(pos_x='0mm', pos_y='0.8mm', orientation='135'))
otg42 = OpenToGround(design, 'open4o', options=dict(pos_x='0.35mm', pos_y='0.45mm', orientation='-45'))
gui.rebuild()
gui.autoscale()
Then we connect pair of pins using a straight route. Notice how we update the pin_opt component names to the new pair, for each new RouteStraight. Indeed, we can only use a pin for one single connection, and we will get an error if we try to connect a second route to the same pin.
[9]:
pin_opt.pin_inputs.start_pin.component = 'open2i'
pin_opt.pin_inputs.end_pin.component = 'open2o'
route2 = RouteStraight(design, 'cpw_2', pin_opt)
pin_opt.pin_inputs.start_pin.component = 'open3i'
pin_opt.pin_inputs.end_pin.component = 'open3o'
route3 = RouteStraight(design, 'cpw_3', pin_opt)
pin_opt.pin_inputs.start_pin.component = 'open4i'
pin_opt.pin_inputs.end_pin.component = 'open4o'
route4 = RouteStraight(design, 'cpw_4', pin_opt)
gui.rebuild()
gui.autoscale()
Example 3: Angles and leads#
If the two pins to connect are not facing each other, the router will create the necessary jogs. Here is a simple example that shows 45° jogs.
The RouteStraight will use a single straight line in any orientation to connect the two pins. Feel free to try using other algorithms, by replacing the class to any other QRoute subclass (image at the start of this notebook).
[10]:
otg51 = OpenToGround(design, 'open5i', options=dict(pos_x='0.7mm', pos_y='1.9mm', orientation='180'))
otg52 = OpenToGround(design, 'open5o', options=dict(pos_x='0.8mm', pos_y='2.0mm', orientation='90'))
pin_opt.pin_inputs.start_pin.component = 'open5i'
pin_opt.pin_inputs.end_pin.component = 'open5o'
route5 = RouteStraight(design, 'cpw_5', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_5'])
#gui.screenshot()
Let’s make another connection. This time, we add a lead extension to both pins. An extension is a route segment that begins from the pin coordinates and extends straight in the pin direction by the given length.
[11]:
otg61 = OpenToGround(design, 'open6i', options=dict(pos_x='0.7mm', pos_y='1.7mm', orientation='180'))
otg62 = OpenToGround(design, 'open6o', options=dict(pos_x='0.8mm', pos_y='1.8mm', orientation='90'))
pin_opt.pin_inputs.start_pin.component = 'open6i'
pin_opt.pin_inputs.end_pin.component = 'open6o'
pin_opt.lead.start_straight = '0.04mm'
pin_opt.lead.end_straight = '0.06mm'
route6 = RouteStraight(design, 'cpw_6', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_6'])
#gui.screenshot()
Example 4: 90° angles#
In most applications, you might want to limit the jogs to 90° angles. In the following example we use the same pin_opts of the previous example, but we replace RouteStraight with RouteFramed. You will notice that our route now has only one 90° jog.
[12]:
otg71 = OpenToGround(design, 'open7i', options=dict(pos_x='0.7mm', pos_y='1.5mm', orientation='180'))
otg72 = OpenToGround(design, 'open7o', options=dict(pos_x='0.8mm', pos_y='1.6mm', orientation='90'))
pin_opt.pin_inputs.start_pin.component = 'open7i'
pin_opt.pin_inputs.end_pin.component = 'open7o'
route7 = RouteFramed(design, 'cpw_7', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_7'])
#gui.screenshot()
The route resulting from the cell above, had no trace of the lead segments. That is because the length of the lead segments was less than the edge of the corner. By extending the start_straight for example, we can see the effect of the lead again.
[13]:
otg81 = OpenToGround(design, 'open8i', options=dict(pos_x='0.7mm', pos_y='1.3mm', orientation='180'))
otg82 = OpenToGround(design, 'open8o', options=dict(pos_x='0.8mm', pos_y='1.4mm', orientation='90'))
pin_opt.pin_inputs.start_pin.component = 'open8i'
pin_opt.pin_inputs.end_pin.component = 'open8o'
pin_opt.lead.start_straight = '0.15mm'
pin_opt.lead.end_straight = '0.05mm'
route8 = RouteFramed(design, 'cpw_8', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_8'])
Notice how the RouteFramed executed in the previous cell needs to create 2 jogs to complete the routing, as opposed to the previous single 90° job example.
This algorithm helps also connecting pins not facing each other, like in the next cell.
[14]:
otg91 = OpenToGround(design, 'open9i', options=dict(pos_x='0.7mm', pos_y='1.05mm', orientation='180'))
otg92 = OpenToGround(design, 'open9o', options=dict(pos_x='0.8mm', pos_y='1.15mm', orientation='270'))
pin_opt.pin_inputs.start_pin.component = 'open9i'
pin_opt.pin_inputs.end_pin.component = 'open9o'
route9 = RouteFramed(design, 'cpw_9', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_9'])
#gui.screenshot()
The RouteFramed can create up to 3 segments. Observe the following case of opposing pins.
[15]:
otg101 = OpenToGround(design, 'open10i', options=dict(pos_x='0.7mm', pos_y='0.8mm', orientation='90'))
otg102 = OpenToGround(design, 'open10o', options=dict(pos_x='0.8mm', pos_y='0.9mm', orientation='270'))
pin_opt.pin_inputs.start_pin.component = 'open10i'
pin_opt.pin_inputs.end_pin.component = 'open10o'
pin_opt.lead.start_straight = '0.03mm'
pin_opt.lead.end_straight = '0.03mm'
route10 = RouteFramed(design, 'cpw_10', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_10'])
#gui.screenshot()
Example 5: Tight control on leads and angles#
QRouteLeads are a “stack” of points that describe in detail the “last-mile” to the pins where the route terminates. These stacks are seeded with the pin coordinates and direction and build incrementally.
In the previous examples we controlled the QRouteLead points by utilizing the lead options inside the pin_opt construct. Specifically, we utilized start_straight and end_straight, which add one point to the respective leads, at the specified distance in the direction specified by the pins (outwards from the QComponent that has the pin).
We are however not limited to a single aligned extension point. Utilizing the start_jogged_extension and end_jogged_extension, we can specify any number of points to add to the lead stacks. The points are computed by providing a OrderedDict() of steps, expressed as [angle,distance] pairs. * distance is the string describing how long the step needs to be * angle describe the direction in which to take the step
The angle can be described in several ways, to accommodate different coding styles. For example, all of the options above will lead to the same 90° left turn: > “L”, “L90”, “R-90”, 90, “90”, “A,90”, “left”, “left90”, “right-90”
[16]:
otg111 = OpenToGround(design, 'open11i', options=dict(pos_x='0.7mm', pos_y='0.5mm', orientation='180'))
otg112 = OpenToGround(design, 'open11o', options=dict(pos_x='0.8mm', pos_y='0.6mm', orientation='270'))
pin_opt.pin_inputs.start_pin.component = 'open11i'
pin_opt.pin_inputs.end_pin.component = 'open11o'
# the first step is always stright, let's define by how much (minimum is half the route width):
pin_opt.lead.start_straight = '0.03mm'
pin_opt.lead.end_straight = '0.04mm'
# any subsequent step of the lead_start
jogsS = OrderedDict()
jogsS[0] = ["L", '20um']
jogsS[1] = ["R", '50um']
jogsS[2] = [90, '30um']
jogsS[3] = [-90, '60um']
jogsS[4] = ["90", '40um']
jogsS[5] = ["-90", '70um']
jogsS[6] = ["L30", '30um']
jogsS[7] = ["A,30", '30um']
jogsS[8] = ["left30", '50um']
# single jog on the lead_end, just for kicks
jogsE = OrderedDict()
jogsE[0] = ["L", '30um']
pin_opt.lead.start_jogged_extension = jogsS
pin_opt.lead.end_jogged_extension = jogsE
route10 = RouteFramed(design, 'cpw_11', pin_opt)
gui.rebuild()
gui.zoom_on_components(['cpw_11'])
#gui.screenshot()
This notebook explains the basics of QRoute, illustrating custom methods to route. In this same tutorial folder you will find other notebooks describing the use of more automated routing options: * RouteMeader to obtain a routing of an exact length * RoutePathfinder to circumvent existing layout obstacles * RouteAnchors to guarantee routing through a given set of non-oriented points * RouteMixed to be able to specify what other auto-route algorithm to use in between
each pair of anchors
[17]:
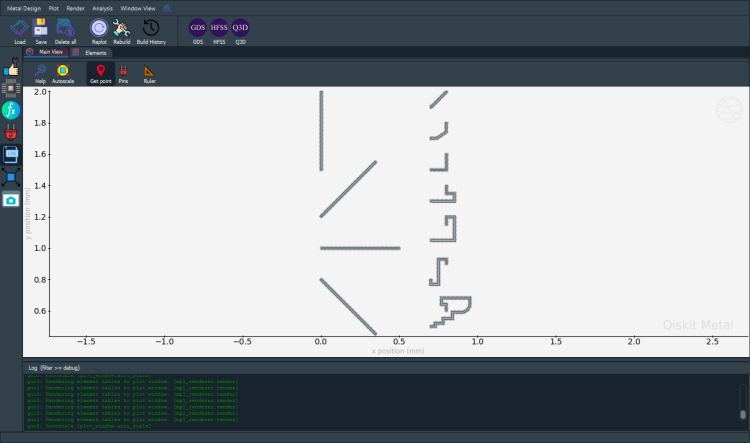
gui.autoscale()
[18]:
gui.screenshot()
[19]:
# gui.main_window.close()
For more information, review the Introduction to Quantum Computing and Quantum Hardware lectures below
|
Lecture Video | Lecture Notes | Lab |
|
Lecture Video | Lecture Notes | Lab |
|
Lecture Video | Lecture Notes | Lab |
|
Lecture Video | Lecture Notes | Lab |
|
Lecture Video | Lecture Notes | Lab |
|
Lecture Video | Lecture Notes | Lab |